
How to make a multi-function Arduino robot
**Build Your Own Arduino Robot** Create a versatile robot with an Arduino board as its brain. Connect motors, sensors (like ultrasonic, line-following, or IR), and a power source. Program the Arduino to control the robot's movements and responses to sensor inputs. **Key Features:** * **Obstacle Avoidance:** Detect and avoid obstacles using sensors. * **Line Following:** Follow a predefined path. * **Remote Control:** Control the robot wirelessly. * **Voice Control:** Command the robot with voice commands. Start with basic functions and gradually add complexity. The world of robotics is vast, and your creativity is the limit!


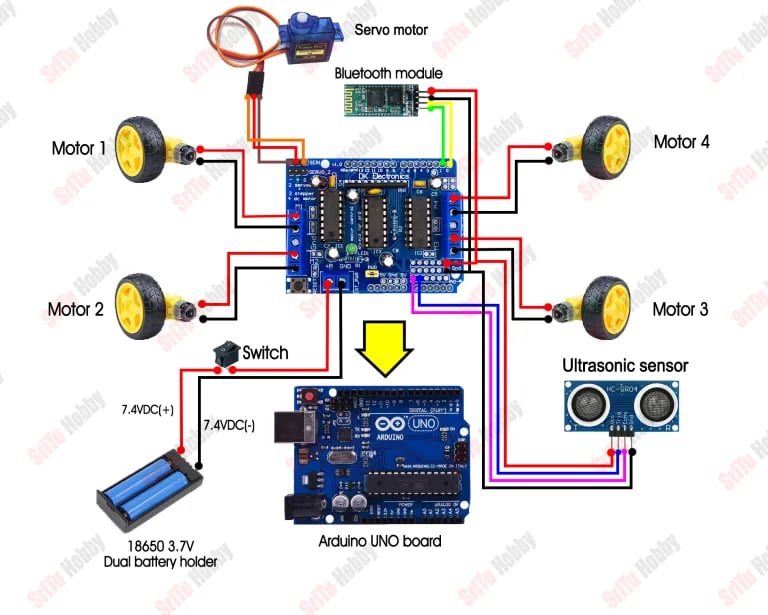
OK, let’s do this project step by step. The required components are given below.
Arduino UNO board x 1
L293D motor driver x 1
Ultrasonic sensor x 1
Bluetooth module x 1
Servo motor x 1
Gear motor x 4
Robot wheel x 4
Li-ion battery holder x 1
Li-ion battery x 2
Jumper wires
Foam board
Cardboard
AF motor library — Download
The complete program of this project – Download
......................ARDUINO CODE.................
/*obstacle avoiding, Bluetooth control, voice control robot car. Home Page /
#include <Servo.h> #include <AFMotor.h> #define Echo A0 #define Trig A1 #define motor 10 #define Speed 170 #define spoint 103 char value; int distance; int Left; int Right; int L = 0; int R = 0; int L1 = 0; int R1 = 0; Servo servo; AF_DCMotor M1(1); AF_DCMotor M2(2); AF_DCMotor M3(3); AF_DCMotor M4(4); void setup() { Serial.begin(9600); pinMode(Trig, OUTPUT); pinMode(Echo, INPUT); servo.attach(motor); M1.setSpeed(Speed); M2.setSpeed(Speed); M3.setSpeed(Speed); M4.setSpeed(Speed); } void loop() { //Obstacle(); //Bluetoothcontrol(); //voicecontrol(); } void Bluetoothcontrol() { if (Serial.available() > 0) { value = Serial.read(); Serial.println(value); } if (value == 'F') { forward(); } else if (value == 'B') { backward(); } else if (value == 'L') { left(); } else if (value == 'R') { right(); } else if (value == 'S') { Stop(); } } void Obstacle() { distance = ultrasonic(); if (distance <= 12) { Stop(); backward(); delay(100); Stop(); L = leftsee(); servo.write(spoint); delay(800); R = rightsee(); servo.write(spoint); if (L < R) { right(); delay(500); Stop(); delay(200); } else if (L > R) { left(); delay(500); Stop(); delay(200); } } else { forward(); } } void voicecontrol() { if (Serial.available() > 0) { value = Serial.read(); Serial.println(value); if (value == '^') { forward(); } else if (value == '-') { backward(); } else if (value == '<') { L = leftsee(); servo.write(spoint); if (L >= 10 ) { left(); delay(500); Stop(); } else if (L < 10) { Stop(); } } else if (value == '>') { R = rightsee(); servo.write(spoint); if (R >= 10 ) { right(); delay(500); Stop(); } else if (R < 10) { Stop(); } } else if (value == '') { Stop(); } } } // Ultrasonic sensor distance reading function int ultrasonic() { digitalWrite(Trig, LOW); delayMicroseconds(4); digitalWrite(Trig, HIGH); delayMicroseconds(10); digitalWrite(Trig, LOW); long t = pulseIn(Echo, HIGH); long cm = t / 29 / 2; //time convert distance return cm; } void forward() { M1.run(FORWARD); M2.run(FORWARD); M3.run(FORWARD); M4.run(FORWARD); } void backward() { M1.run(BACKWARD); M2.run(BACKWARD); M3.run(BACKWARD); M4.run(BACKWARD); } void right() { M1.run(BACKWARD); M2.run(BACKWARD); M3.run(FORWARD); M4.run(FORWARD); } void left() { M1.run(FORWARD); M2.run(FORWARD); M3.run(BACKWARD); M4.run(BACKWARD); } void Stop() { M1.run(RELEASE); M2.run(RELEASE); M3.run(RELEASE); M4.run(RELEASE); } int rightsee() { servo.write(20); delay(800); Left = ultrasonic(); return Left; } int leftsee() { servo.write(180); delay(800); Right = ultrasonic(); return Right; }