
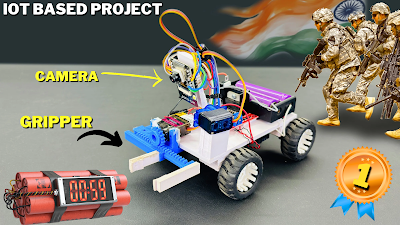
WiFi Detective Robot - for Army | IOT Based Army Robot with Camera | Best science Project | HarishProjects.com
The **WiFi Detective Robot** is an innovative IoT-based project designed for military applications, blending advanced technology with practical utility. Here’s a brief overview of its key features and functionalities: ### Overview - **Purpose:** The robot is designed to detect and analyze WiFi signals in its vicinity, making it a valuable tool for reconnaissance and surveillance in military operations. - **Target Audience:** Ideal for educational purposes, particularly for science projects, and for deployment in army settings. ### Key Features 1. **WiFi Signal Detection:** - Capable of scanning for nearby WiFi networks, identifying their strength and security protocols. - Useful for locating unauthorized networks or potential threats in a combat area. 2. **Camera Integration:** - Equipped with a high-resolution camera that can capture live video and images, providing real-time surveillance capability. - Can transmit data back to a control center for analysis, enhancing situational awareness. 3. **IoT Connectivity:** - Utilizes Internet of Things (IoT) technology to connect with other devices and systems. - Allows for remote monitoring and control via mobile or web applications. 4. **Mobility:** - Designed for rugged terrain, providing the ability to navigate various environments. - Incorporates sensors and wheels for easy movement and obstacle avoidance. 5. **User-Friendly Interface:** - Comes with a straightforward control panel and software for easy operation. - Offers data visualization tools to interpret the WiFi and surveillance data effectively. ### Applications - **Military Reconnaissance:** Ideal for scouting missions where soldiers need to gather intelligence without risking personnel. - **Surveillance:** Can be deployed to watch critical areas, monitoring any suspicious activities. - **Disaster Management:** Useful in search and rescue operations where communication infrastructure might be compromised. ### Educational Value - **Science Project:** Serves as an excellent project for students interested in robotics, programming, and IoT. - **Hands-On Learning:** Helps students understand the principles of wireless communication, robotics design, and data analysis. ### Conclusion The WiFi Detective Robot represents a blend of cutting-edge technology and practical application, making it an exemplary project for anyone looking to explore the realms of robotics, IoT, and military technology. For more details, further exploration, or purchase inquiries, visiting **HarishProjects.com** would provide comprehensive information. If you need more specific details or have any particular questions about its design or functionality, feel free to ask!
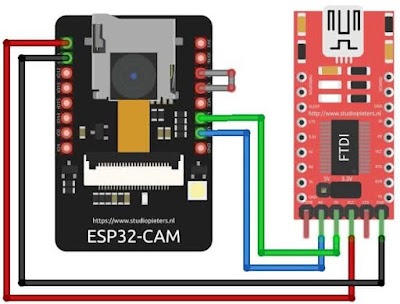
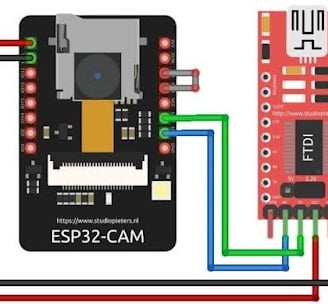
Connection Diagram for FTDI Module
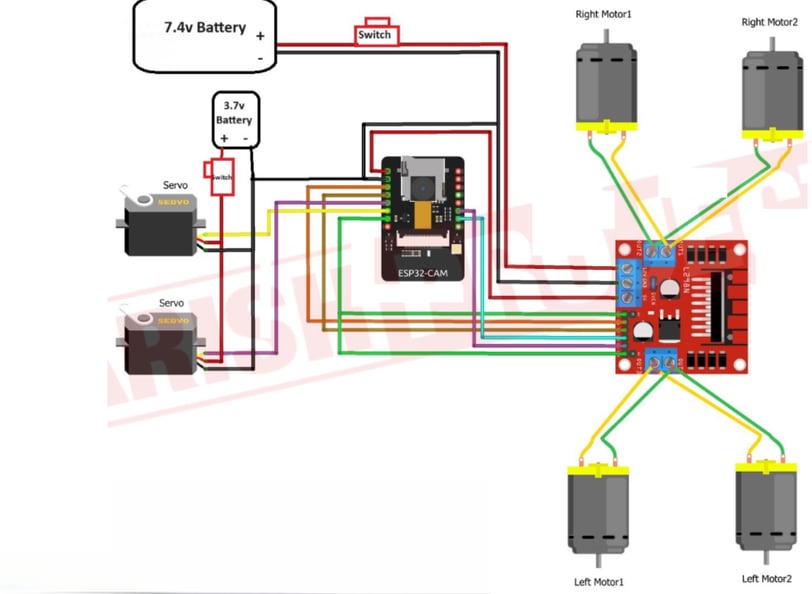
Project Diagram
Project Code
#include "esp_camera.h"
#include <Arduino.h>
#include <WiFi.h>
#include <AsyncTCP.h>
#include <ESPAsyncWebServer.h>
#include <iostream>
#include <sstream>
#include <ESP32Servo.h>
#define PAN_PIN 14
#define TILT_PIN 15
Servo panServo;
Servo tiltServo;
struct MOTOR_PINS
{
int pinEn;
int pinIN1;
int pinIN2;
};
std::vector<MOTOR_PINS> motorPins =
{
{2, 12, 13}, //RIGHT_MOTOR Pins (EnA, IN1, IN2)
{2, 1, 3}, //LEFT_MOTOR Pins (EnB, IN3, IN4)
};
#define LIGHT_PIN 4
#define UP 1
#define DOWN 2
#define LEFT 3
#define RIGHT 4
#define STOP 0
#define RIGHT_MOTOR 0
#define LEFT_MOTOR 1
#define FORWARD 1
#define BACKWARD -1
const int PWMFreq = 1000; /* 1 KHz */
const int PWMResolution = 8;
const int PWMSpeedChannel = 2;
const int PWMLightChannel = 3;
//Camera related constants
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
const char* ssid = "MyWiFiCar";
const char* password = "12345678";
AsyncWebServer server(80);
AsyncWebSocket wsCamera("/Camera");
AsyncWebSocket wsCarInput("/CarInput");
uint32_t cameraClientId = 0;
const char* htmlHomePage PROGMEM = R"HTMLHOMEPAGE(
<!DOCTYPE html>
<html>
<head>
<meta name="viewport" content="width=device-width, initial-scale=1, maximum-scale=1, user-scalable=no">
<style>
.arrows {
font-size:30px;
color:red;
}
td.button {
background-color:black;
border-radius:25%;
box-shadow: 5px 5px #888888;
}
td.button:active {
transform: translate(5px,5px);
box-shadow: none;
}
.noselect {
-webkit-touch-callout: none; /* iOS Safari */
-webkit-user-select: none; /* Safari */
-khtml-user-select: none; /* Konqueror HTML */
-moz-user-select: none; /* Firefox */
-ms-user-select: none; /* Internet Explorer/Edge */
user-select: none; /* Non-prefixed version, currently
supported by Chrome and Opera */
}
.slidecontainer {
width: 100%;
}
.slider {
-webkit-appearance: none;
width: 100%;
height: 15px;
border-radius: 5px;
background: #d3d3d3;
outline: none;
opacity: 0.7;
-webkit-transition: .2s;
transition: opacity .2s;
}
.slider:hover {
opacity: 1;
}
.slider::-webkit-slider-thumb {
-webkit-appearance: none;
appearance: none;
width: 25px;
height: 25px;
border-radius: 50%;
background: red;
cursor: pointer;
}
.slider::-moz-range-thumb {
width: 25px;
height: 25px;
border-radius: 50%;
background: red;
cursor: pointer;
}
</style>
</head>
<body class="noselect" align="center" style="background-color:white">
<table id="mainTable" style="width:400px;margin:auto;table-layout:fixed" CELLSPACING=10>
<tr>
<img id="cameraImage" src="" style="width:400px;height:250px"></td>
</tr>
<tr>
<td></td>
<td class="button" ontouchstart='sendButtonInput("MoveCar","1")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇧</span></td>
<td></td>
</tr>
<tr>
<td class="button" ontouchstart='sendButtonInput("MoveCar","3")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇦</span></td>
<td class="button"></td>
<td class="button" ontouchstart='sendButtonInput("MoveCar","4")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇨</span></td>
</tr>
<tr>
<td></td>
<td class="button" ontouchstart='sendButtonInput("MoveCar","2")' ontouchend='sendButtonInput("MoveCar","0")'><span class="arrows" >⇩</span></td>
<td></td>
</tr>
<tr/><tr/>
<tr>
<td style="text-align:left"><b>Speed:</b></td>
<td colspan=2>
<div class="slidecontainer">
<input type="range" min="0" max="255" value="150" class="slider" id="Speed" oninput='sendButtonInput("Speed",value)'>
</div>
</td>
</tr>
<tr>
<td style="text-align:left"><b>Light:</b></td>
<td colspan=2>
<div class="slidecontainer">
<input type="range" min="0" max="255" value="0" class="slider" id="Light" oninput='sendButtonInput("Light",value)'>
</div>
</td>
</tr>
<tr>
<td style="text-align:left"><b>Pan:</b></td>
<td colspan=2>
<div class="slidecontainer">
<input type="range" min="0" max="180" value="90" class="slider" id="Pan" oninput='sendButtonInput("Pan",value)'>
</div>
</td>
</tr>
<tr>
<td style="text-align:left"><b>Tilt:</b></td>
<td colspan=2>
<div class="slidecontainer">
<input type="range" min="0" max="180" value="90" class="slider" id="Tilt" oninput='sendButtonInput("Tilt",value)'>
</div>
</td>
</tr>
</table>
<script>
var webSocketCameraUrl = "ws:\/\/" + window.location.hostname + "/Camera";
var webSocketCarInputUrl = "ws:\/\/" + window.location.hostname + "/CarInput";
var websocketCamera;
var websocketCarInput;
function initCameraWebSocket()
{
websocketCamera = new WebSocket(webSocketCameraUrl);
websocketCamera.binaryType = 'blob';
websocketCamera.onopen = function(event){};
websocketCamera.onclose = function(event){setTimeout(initCameraWebSocket, 2000);};
websocketCamera.onmessage = function(event)
{
var imageId = document.getElementById("cameraImage");
imageId.src = URL.createObjectURL(event.data);
};
}
function initCarInputWebSocket()
{
websocketCarInput = new WebSocket(webSocketCarInputUrl);
websocketCarInput.onopen = function(event)
{
sendButtonInput("Speed", document.getElementById("Speed").value);
sendButtonInput("Light", document.getElementById("Light").value);
sendButtonInput("Pan", document.getElementById("Pan").value);
sendButtonInput("Tilt", document.getElementById("Tilt").value);
};
websocketCarInput.onclose = function(event){setTimeout(initCarInputWebSocket, 2000);};
websocketCarInput.onmessage = function(event){};
}
function initWebSocket()
{
initCameraWebSocket ();
initCarInputWebSocket();
}
function sendButtonInput(key, value)
{
var data = key + "," + value;
websocketCarInput.send(data);
}
window.onload = initWebSocket;
document.getElementById("mainTable").addEventListener("touchend", function(event){
event.preventDefault()
});
</script>
</body>
</html>
)HTMLHOMEPAGE";
void rotateMotor(int motorNumber, int motorDirection)
{
if (motorDirection == FORWARD)
{
digitalWrite(motorPins[motorNumber].pinIN1, HIGH);
digitalWrite(motorPins[motorNumber].pinIN2, LOW);
}
else if (motorDirection == BACKWARD)
{
digitalWrite(motorPins[motorNumber].pinIN1, LOW);
digitalWrite(motorPins[motorNumber].pinIN2, HIGH);
}
else
{
digitalWrite(motorPins[motorNumber].pinIN1, LOW);
digitalWrite(motorPins[motorNumber].pinIN2, LOW);
}
}
void moveCar(int inputValue)
{
Serial.printf("Got value as %d\n", inputValue);
switch(inputValue)
{
case UP:
rotateMotor(RIGHT_MOTOR, FORWARD);
rotateMotor(LEFT_MOTOR, FORWARD);
break;
case DOWN:
rotateMotor(RIGHT_MOTOR, BACKWARD);
rotateMotor(LEFT_MOTOR, BACKWARD);
break;
case LEFT:
rotateMotor(RIGHT_MOTOR, FORWARD);
rotateMotor(LEFT_MOTOR, BACKWARD);
break;
case RIGHT:
rotateMotor(RIGHT_MOTOR, BACKWARD);
rotateMotor(LEFT_MOTOR, FORWARD);
break;
case STOP:
rotateMotor(RIGHT_MOTOR, STOP);
rotateMotor(LEFT_MOTOR, STOP);
break;
default:
rotateMotor(RIGHT_MOTOR, STOP);
rotateMotor(LEFT_MOTOR, STOP);
break;
}
}
void handleRoot(AsyncWebServerRequest *request)
{
request->send_P(200, "text/html", htmlHomePage);
}
void handleNotFound(AsyncWebServerRequest *request)
{
request->send(404, "text/plain", "File Not Found");
}
void onCarInputWebSocketEvent(AsyncWebSocket *server,
AsyncWebSocketClient *client,
AwsEventType type,
void *arg,
uint8_t *data,
size_t len)
{
switch (type)
{
case WS_EVT_CONNECT:
Serial.printf("WebSocket client #%u connected from %s\n", client->id(), client->remoteIP().toString().c_str());
break;
case WS_EVT_DISCONNECT:
Serial.printf("WebSocket client #%u disconnected\n", client->id());
moveCar(0);
ledcWrite(PWMLightChannel, 0);
panServo.write(90);
tiltServo.write(90);
break;
case WS_EVT_DATA:
AwsFrameInfo *info;
info = (AwsFrameInfo*)arg;
if (info->final && info->index == 0 && info->len == len && info->opcode == WS_TEXT)
{
std::string myData = "";
myData.assign((char *)data, len);
std::istringstream ss(myData);
std::string key, value;
std::getline(ss, key, ',');
std::getline(ss, value, ',');
Serial.printf("Key [%s] Value[%s]\n", key.c_str(), value.c_str());
int valueInt = atoi(value.c_str());
if (key == "MoveCar")
{
moveCar(valueInt);
}
else if (key == "Speed")
{
ledcWrite(PWMSpeedChannel, valueInt);
}
else if (key == "Light")
{
ledcWrite(PWMLightChannel, valueInt);
}
else if (key == "Pan")
{
panServo.write(valueInt);
}
else if (key == "Tilt")
{
tiltServo.write(valueInt);
}
}
break;
case WS_EVT_PONG:
case WS_EVT_ERROR:
break;
default:
break;
}
}
void onCameraWebSocketEvent(AsyncWebSocket *server,
AsyncWebSocketClient *client,
AwsEventType type,
void *arg,
uint8_t *data,
size_t len)
{
switch (type)
{
case WS_EVT_CONNECT:
Serial.printf("WebSocket client #%u connected from %s\n", client->id(), client->remoteIP().toString().c_str());
cameraClientId = client->id();
break;
case WS_EVT_DISCONNECT:
Serial.printf("WebSocket client #%u disconnected\n", client->id());
cameraClientId = 0;
break;
case WS_EVT_DATA:
break;
case WS_EVT_PONG:
case WS_EVT_ERROR:
break;
default:
break;
}
}
void setupCamera()
{
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_4;
config.ledc_timer = LEDC_TIMER_2;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
config.frame_size = FRAMESIZE_VGA;
config.jpeg_quality = 10;
config.fb_count = 1;
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK)
{
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
if (psramFound())
{
heap_caps_malloc_extmem_enable(20000);
Serial.printf("PSRAM initialized. malloc to take memory from psram above this size");
}
}
void sendCameraPicture()
{
if (cameraClientId == 0)
{
return;
}
unsigned long startTime1 = millis();
//capture a frame
camera_fb_t * fb = esp_camera_fb_get();
if (!fb)
{
Serial.println("Frame buffer could not be acquired");
return;
}
unsigned long startTime2 = millis();
wsCamera.binary(cameraClientId, fb->buf, fb->len);
esp_camera_fb_return(fb);
//Wait for message to be delivered
while (true)
{
AsyncWebSocketClient * clientPointer = wsCamera.client(cameraClientId);
if (!clientPointer || !(clientPointer->queueIsFull()))
{
break;
}
delay(1);
}
unsigned long startTime3 = millis();
Serial.printf("Time taken Total: %d|%d|%d\n",startTime3 - startTime1, startTime2 - startTime1, startTime3-startTime2 );
}
void setUpPinModes()
{
panServo.attach(PAN_PIN);
tiltServo.attach(TILT_PIN);
//Set up PWM
ledcSetup(PWMSpeedChannel, PWMFreq, PWMResolution);
ledcSetup(PWMLightChannel, PWMFreq, PWMResolution);
for (int i = 0; i < motorPins.size(); i++)
{
pinMode(motorPins[i].pinEn, OUTPUT);
pinMode(motorPins[i].pinIN1, OUTPUT);
pinMode(motorPins[i].pinIN2, OUTPUT);
/* Attach the PWM Channel to the motor enb Pin */
ledcAttachPin(motorPins[i].pinEn, PWMSpeedChannel);
}
moveCar(STOP);
pinMode(LIGHT_PIN, OUTPUT);
ledcAttachPin(LIGHT_PIN, PWMLightChannel);
}
void setup(void)
{
setUpPinModes();
//Serial.begin(115200);
WiFi.softAP(ssid, password);
IPAddress IP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(IP);
server.on("/", HTTP_GET, handleRoot);
server.onNotFound(handleNotFound);
wsCamera.onEvent(onCameraWebSocketEvent);
server.addHandler(&wsCamera);
wsCarInput.onEvent(onCarInputWebSocketEvent);
server.addHandler(&wsCarInput);
server.begin();
Serial.println("HTTP server started");
setupCamera();
}
void loop()
{
wsCamera.cleanupClients();
wsCarInput.cleanupClients();
sendCameraPicture();
Serial.printf("SPIRam Total heap %d, SPIRam Free Heap %d\n", ESP.getPsramSize(), ESP.getFreePsram());
}