Create Your Own CCTV Camera System Using the ESP32-CAM Module
This project details building a simple, low-cost CCTV system using an ESP32-CAM module. The ESP32-CAM's built-in camera and Wi-Fi capabilities allow for remote viewing and recording of video footage, all controlled through readily available software and firmware. DIY CCTV, ESP32-CAM, ESP32, CCTV Camera, Surveillance, Home Security, IoT, Internet of Things, Arduino, Raspberry Pi, Smart Home, Electronics Project, Embedded Systems, Servo Motor Control, Web Server, Remote Monitoring, Wireless Camera, Low-Cost CCTV, Panning Camera, WiFi Camera, Real-Time Video
SCIENCE PROJECTS


Build your own CCTV system using an ESP32-CAM module! This project guides you through creating a simple, remotely controlled camera. A servo motor allows for 180-degree horizontal panning, and a user-friendly web interface enables control and viewing from any device. While this is a basic design, it's easily expandable with features like motion or face detection
Ok, let's do this project step-by-step. The required components are:
ESP32-CAM module x 1
SG90 servo motor x 1
TTL programmer x 1
Jumper wires
170 Breadboard x 1
That's a good start. To make this a more useful description of the making process, we need more detail. What are the steps involved in assembling and programming this CCTV system? For example:
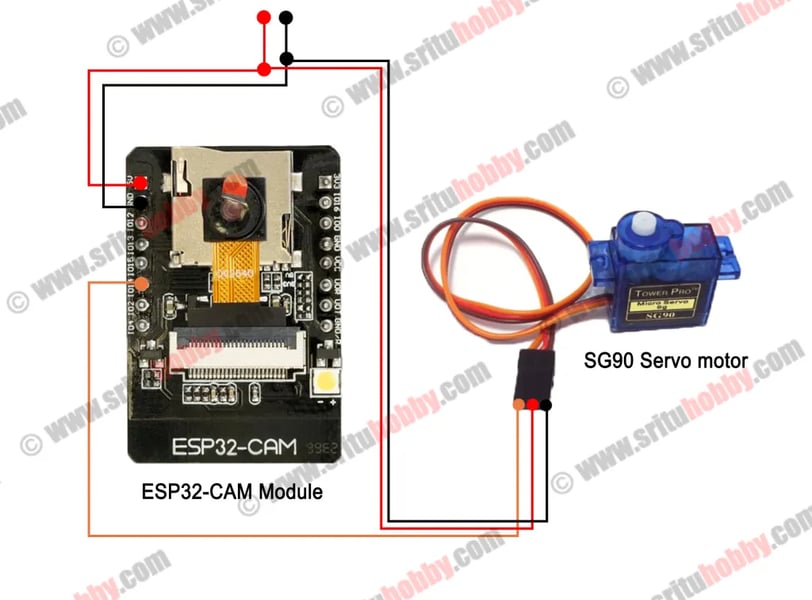
* Step 1: Wiring the ESP32-CAM, servo motor, and breadboard. (Include specifics like which pins connect where.)
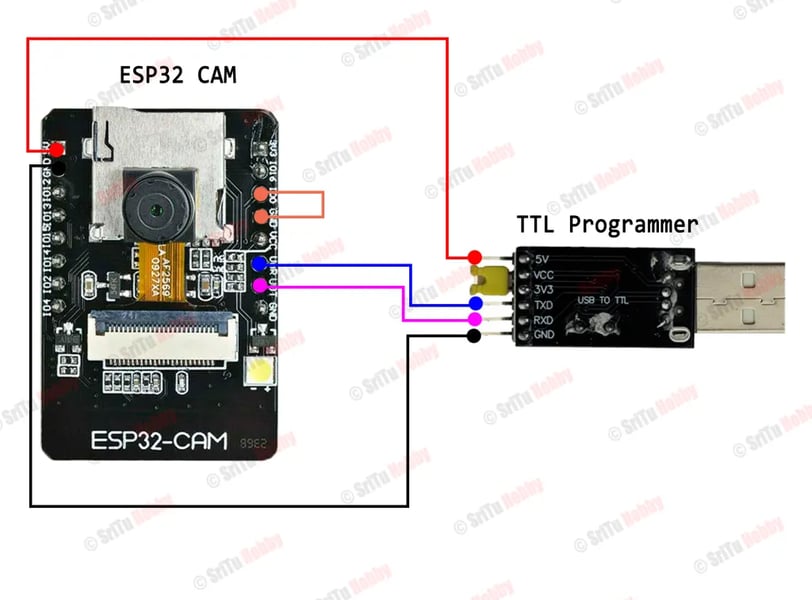
* Step 2: Uploading the necessary firmware to the ESP32-CAM. (Mention the type of firmware or where to get it.)
* Step 3: Setting up the web server and configuring network access. (Details about the setup are crucial.)
* Step 4: (optional) Testing and calibration of the servo motor's range of motion.
* Step 5: (optional) Adding any advanced features.
Without these steps, the description only lists components, not the process of creating the system.
Code and Circuit diagrams
#include "esp_camera.h" #include <WiFi.h> #include "esp_timer.h" #include "img_converters.h" #include "Arduino.h" #include "fb_gfx.h" #include "soc/soc.h" // disable brownout problems #include "soc/rtc_cntl_reg.h" // disable brownout problems #include "esp_http_server.h" #include <ESP32Servo.h> // Replace with your network credentials const char* ssid = "***************"; const char* password = "**************"; #define PART_BOUNDARY "123456789000000000000987654321" #define CAMERA_MODEL_AI_THINKER #if defined(CAMERA_MODEL_AI_THINKER) #define PWDN_GPIO_NUM 32 #define RESET_GPIO_NUM -1 #define XCLK_GPIO_NUM 0 #define SIOD_GPIO_NUM 26 #define SIOC_GPIO_NUM 27 #define Y9_GPIO_NUM 35 #define Y8_GPIO_NUM 34 #define Y7_GPIO_NUM 39 #define Y6_GPIO_NUM 36 #define Y5_GPIO_NUM 21 #define Y4_GPIO_NUM 19 #define Y3_GPIO_NUM 18 #define Y2_GPIO_NUM 5 #define VSYNC_GPIO_NUM 25 #define HREF_GPIO_NUM 23 #define PCLK_GPIO_NUM 22 #else #error "Camera model not selected" #endif #define SERVO_1 14 #define SERVO_STEP 5 Servo servo; int servoPos = 90; static const char* STREAMCONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY; static const char* STREAMBOUNDARY = "\r\n--" PART_BOUNDARY "\r\n"; static const char* STREAMPART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n"; httpd_handle_t camera_httpd = NULL; httpd_handle_t stream_httpd = NULL; static const char PROGMEM INDEX_HTML[] = R"rawliteral( <!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8"> <meta name="viewport" content="width=device-width, initial-scale=1.0"> <title>CCTV Security System</title> <style> body { font-family: Arial, sans-serif; margin: 0; padding: 0; background-color: #000; color: #fff; text-align: center; } .header { background-color: #ff0000; color: #fff; padding: 20px 0; } .header h1 { margin: 0; } .container { display: flex; flex-direction: column; align-items: center; justify-content: flex-start; /* Adjusted to top-align content / min-height: 100vh; / Allow the container to fill the entire height of the screen / padding-top: 40px; / Add padding to prevent content from being too close to header / } .stream { margin: 10px auto; max-width: 100%; border: 2px solid #fff000; border-radius: 10px; } .controls { margin-top: 20px; } .button { background-color: #fff000; border: none; color: #000; padding: 15px 30px; margin: 5px; font-size: 16px; cursor: pointer; border-radius: 5px; transition: background-color 0.3s; } .button:hover { background-color: #cccc00; } .dropdown { margin-top: 15px; padding: 10px; font-size: 16px; background-color: #fff000; color: #000; border: 1px solid #000; border-radius: 5px; } / Mobile responsiveness / @media screen and (max-width: 600px) { .container { flex-direction: column; padding: 10px; } .button { padding: 10px 20px; font-size: 14px; } } / Dark Mode / body.dark-mode { background-color: #333; color: #fff; } .dark-mode .header { background-color: #ff6600; } </style> </head> <body> <div class="header"> <h1>CCTV Security System - Powered by SriTu Hobby</h1> </div> <div class="container"> <!-- Camera Stream --> <img src="" id="photo" class="stream" alt="Camera Stream"> <!-- Camera Control --> <div class="controls"> <button class="button" onclick="sendCommand('left')">Left</button> <button class="button" onclick="sendCommand('right')">Right</button> <button class="button" onclick="sendCommand('flash_on')">Flash On</button> <button class="button" onclick="sendCommand('flash_off')">Flash Off</button> </div> <!-- Screen Size Control --> <select id="screenSize" class="dropdown" onchange="changeScreenSize()"> <option value="100">Default</option> <option value="75">75%</option> <option value="50">50%</option> <option value="25">25%</option> </select> <!-- Status Indicator --> <div id="status">Camera Status: <span id="cameraStatus">Loading...</span></div> <!-- Dark Mode Toggle --> <button class="button" onclick="toggleMode()">Toggle Dark Mode</button> <!-- Real-Time Log --> <div id="log" style="margin-top: 20px; text-align: left; max-height: 200px; overflow-y: auto;"></div> </div> <script> // Update the camera stream source window.onload = () => { const photo = document.getElementById("photo"); const cameraStatus = document.getElementById("cameraStatus"); const log = document.getElementById("log"); // Simulate camera status check setTimeout(() => { photo.src = `${window.location.origin}:81/stream`; cameraStatus.innerText = "Online"; log.innerHTML += "<p>[INFO] Camera Stream started.</p>"; }, 2000); // Simulate delay for stream loading // Set status to offline if stream fails photo.onerror = () => { cameraStatus.innerText = "Offline"; log.innerHTML += "<p>[ERROR] Camera Stream failed.</p>"; }; }; // Send camera movement command function sendCommand(direction) { fetch(`/action?go=${direction}`); const log = document.getElementById("log"); log.innerHTML += `<p>[COMMAND] Camera moved ${direction}</p>`; } // Change screen size of the camera stream function changeScreenSize() { const photo = document.getElementById("photo"); const screenSize = document.getElementById("screenSize").value; photo.style.width = screenSize + "%"; const log = document.getElementById("log"); log.innerHTML += `<p>[INFO] Screen size changed to ${screenSize}%</p>`; } //flashlight function sendCommand(command) { fetch(`/action?go=${command}`); } // Toggle dark mode function toggleMode() { document.body.classList.toggle('dark-mode'); const log = document.getElementById("log"); log.innerHTML += "<p>[INFO] Dark mode toggled.</p>"; } </script> </body> </html> )rawliteral"; static esp_err_t index_handler(httpd_req_t req){ httpd_resp_set_type(req, "text/html"); return httpd_resp_send(req, (const char )INDEX_HTML, strlen(INDEX_HTML)); } static esp_err_t stream_handler(httpd_req_t req){ camera_fb_t fb = NULL; esp_err_t res = ESP_OK; size_t jpgbuf_len = 0; uint8_t jpgbuf = NULL; char part_buf[64]; res = httpd_resp_set_type(req, STREAMCONTENT_TYPE); if(res != ESP_OK){ return res; } while(true){ fb = esp_camera_fb_get(); if (!fb) { Serial.println("Camera capture failed"); res = ESP_FAIL; } else { if(fb->width > 400){ if(fb->format != PIXFORMAT_JPEG){ bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len); esp_camera_fb_return(fb); fb = NULL; if(!jpeg_converted){ Serial.println("JPEG compression failed"); res = ESP_FAIL; } } else { jpgbuf_len = fb->len; jpgbuf = fb->buf; } } } if(res == ESP_OK){ size_t hlen = snprintf((char )part_buf, 64, STREAMPART, jpgbuf_len); res = httpd_resp_send_chunk(req, (const char )part_buf, hlen); } if(res == ESP_OK){ res = httpd_resp_send_chunk(req, (const char )_jpg_buf, jpgbuf_len); } if(res == ESP_OK){ res = httpd_resp_send_chunk(req, STREAMBOUNDARY, strlen(_STREAM_BOUNDARY)); } if(fb){ esp_camera_fb_return(fb); fb = NULL; jpgbuf = NULL; } else if(_jpg_buf){ free(_jpg_buf); jpgbuf = NULL; } if(res != ESP_OK){ break; } } return res; } static esp_err_t cmd_handler(httpd_req_t req){ char buf; size_t buf_len; char variable[32] = {0,}; buf_len = httpd_req_get_url_query_len(req) + 1; if (buf_len > 1) { buf = (char*)malloc(buf_len); if(!buf){ httpd_resp_send_500(req); return ESP_FAIL; } if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) { if (httpd_query_key_value(buf, "go", variable, sizeof(variable)) == ESP_OK) { } else { free(buf); httpd_resp_send_404(req); return ESP_FAIL; } } else { free(buf); httpd_resp_send_404(req); return ESP_FAIL; } free(buf); } else { httpd_resp_send_404(req); return ESP_FAIL; } int res = 0; if(!strcmp(variable, "left")) { if(servoPos <= 170) { servoPos += 10; servo.write(servoPos); delay(10); } Serial.println(servoPos); Serial.println("Left"); } else if(!strcmp(variable, "right")) { if(servoPos >= 10) { servoPos -= 10; servo.write(servoPos); delay(10); } Serial.println(servoPos); Serial.println("Right"); } else if (!strcmp(variable, "flash_on")) { digitalWrite(4, HIGH); // Turn on the flashlight Serial.println("Flashlight ON"); } else if (!strcmp(variable, "flash_off")) { digitalWrite(4, LOW); // Turn off the flashlight Serial.println("Flashlight OFF"); } else { res = -1; } if(res){ return httpd_resp_send_500(req); } httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*"); return httpd_resp_send(req, NULL, 0); } void startCameraServer(){ httpd_config_t config = HTTPD_DEFAULT_CONFIG(); config.server_port = 80; httpd_uri_t index_uri = { .uri = "/", .method = HTTP_GET, .handler = index_handler, .user_ctx = NULL }; httpd_uri_t cmd_uri = { .uri = "/action", .method = HTTP_GET, .handler = cmd_handler, .user_ctx = NULL }; httpd_uri_t stream_uri = { .uri = "/stream", .method = HTTP_GET, .handler = stream_handler, .user_ctx = NULL }; if (httpd_start(&camera_httpd, &config) == ESP_OK) { httpd_register_uri_handler(camera_httpd, &index_uri); httpd_register_uri_handler(camera_httpd, &cmd_uri); } config.server_port += 1; config.ctrl_port += 1; if (httpd_start(&stream_httpd, &config) == ESP_OK) { httpd_register_uri_handler(stream_httpd, &stream_uri); } } void setup() { WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0); //disable brownout detector //servo.setPeriodHertz(50); // standard 50 hz servo servo.attach(SERVO_1, 1000, 2000); pinMode(4, OUTPUT); digitalWrite(4, LOW); servo.write(servoPos); Serial.begin(115200); Serial.setDebugOutput(false); camera_config_t config; config.ledc_channel = LEDC_CHANNEL_0; config.ledc_timer = LEDC_TIMER_0; config.pin_d0 = Y2_GPIO_NUM; config.pin_d1 = Y3_GPIO_NUM; config.pin_d2 = Y4_GPIO_NUM; config.pin_d3 = Y5_GPIO_NUM; config.pin_d4 = Y6_GPIO_NUM; config.pin_d5 = Y7_GPIO_NUM; config.pin_d6 = Y8_GPIO_NUM; config.pin_d7 = Y9_GPIO_NUM; config.pin_xclk = XCLK_GPIO_NUM; config.pin_pclk = PCLK_GPIO_NUM; config.pin_vsync = VSYNC_GPIO_NUM; config.pin_href = HREF_GPIO_NUM; config.pin_sscb_sda = SIOD_GPIO_NUM; config.pin_sscb_scl = SIOC_GPIO_NUM; config.pin_pwdn = PWDN_GPIO_NUM; config.pin_reset = RESET_GPIO_NUM; config.xclk_freq_hz = 20000000; config.pixel_format = PIXFORMAT_JPEG; if(psramFound()){ config.frame_size = FRAMESIZE_VGA; config.jpeg_quality = 10; config.fb_count = 2; } else { config.frame_size = FRAMESIZE_SVGA; config.jpeg_quality = 12; config.fb_count = 1; } // Camera init esp_err_t err = esp_camera_init(&config); if (err != ESP_OK) { Serial.printf("Camera init failed with error 0x%x", err); return; } //Rotate sensor_t *s = esp_camera_sensor_get(); if(s != NULL){ s->set_hmirror(s, 0); s->set_vflip(s, 1); } // Wi-Fi connection WiFi.begin(ssid, password); while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } Serial.println(""); Serial.println("WiFi connected"); Serial.print("Camera Stream Ready! Go to: http://"); Serial.println(WiFi.localIP()); // Start streaming web server startCameraServer(); } void loop() { }